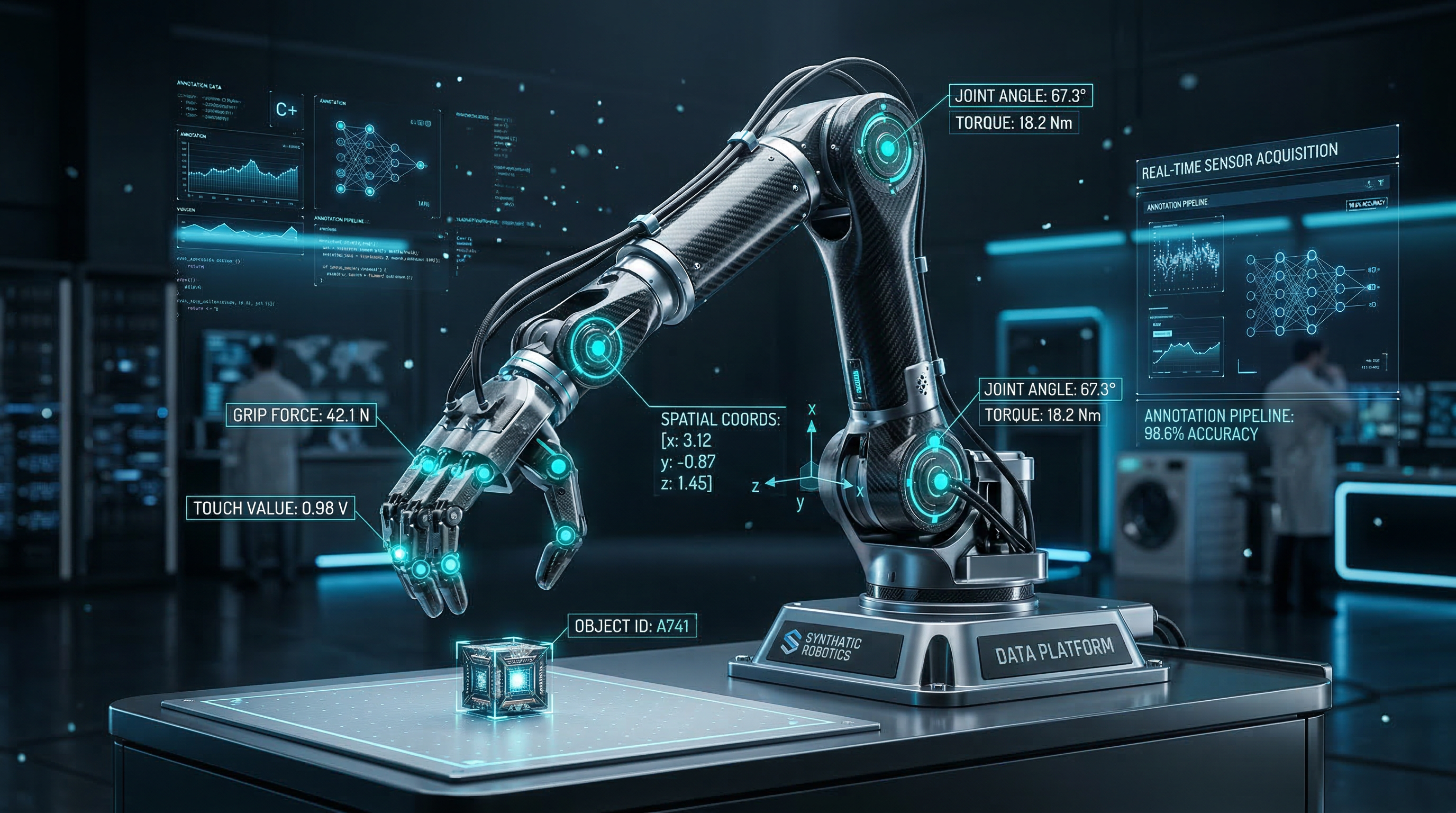
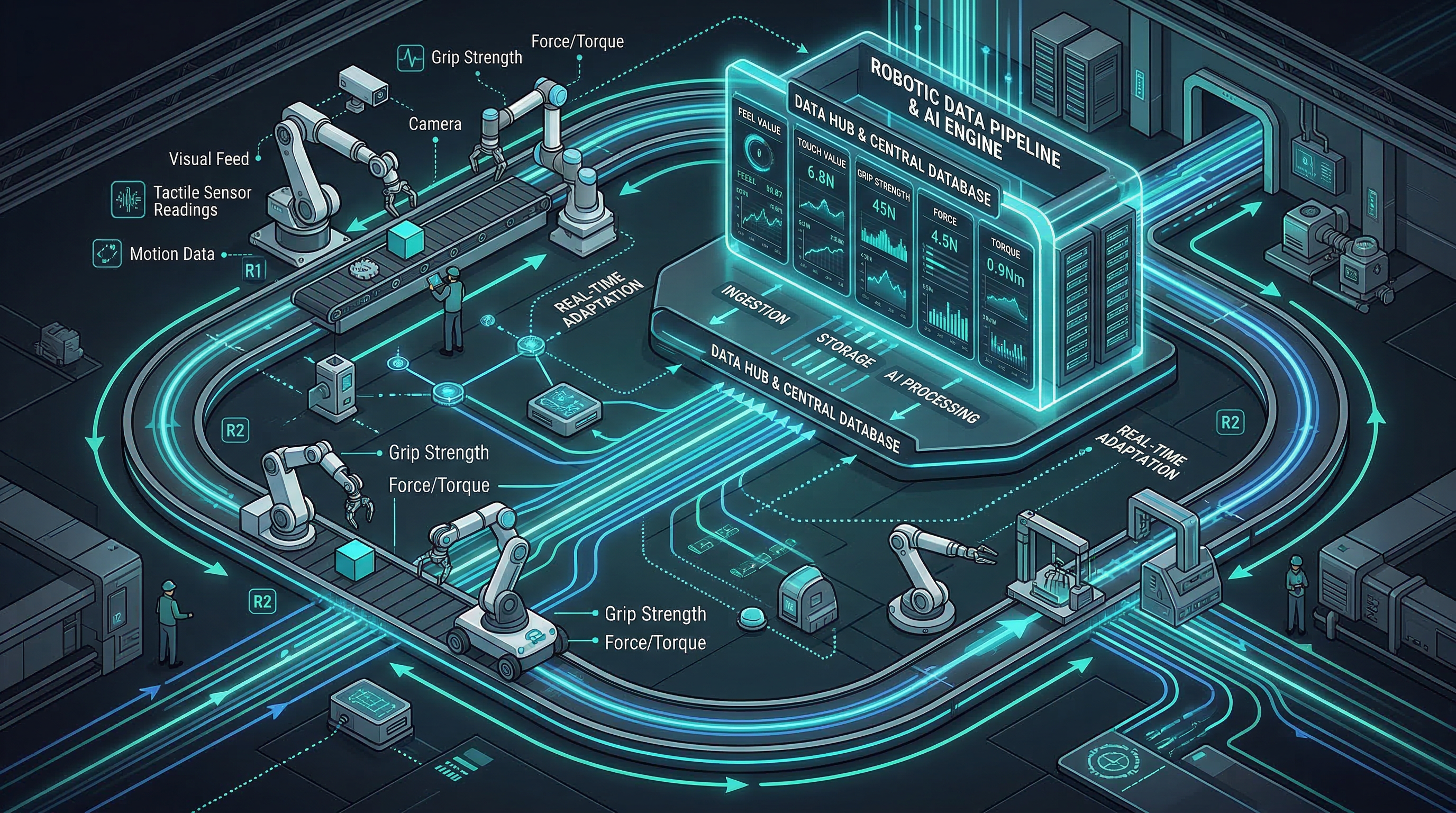
The Data Platform for Physical AI
Breakthrough Physical AI
from Data to Deployment
labelrobotics.io delivers proven datasets, annotations, and outcomes to robotics labs and physical AI companies. Every dataset your robots need — labeled, structured, and ready to train.
Robotics Companies
Physical AI Labs
Enterprise Automation